Koti
>
Tuotteet > Laseretäisyysmittari moduuli > 1535 nm:n laseretäisyysmittarimoduuli > 4 km silmän turvallinen laserruotolaite moduuli (LRF)




")




4 km silmän turvallinen laserruotolaite moduuli (LRF)
STA-B40X on ihmisen silmä-turvallinen laseretäisyyden mittausmoduuli, joka voi havaita kohdeetäisyyden ja lähettää mitatun etäisyyden ylätietokoneeseen sarjaviestinnän kautta. Näkyvyys ≥ 12 km, kohteen heijastavuus ≥ 0,3, kosteus ≤ 80%, ajoneuvo (2,3 m × 2,3 metriä) etäisyyden etäisyys ≥ 4 km.
Lähetä kysely
Tuotteen Kuvaus
Päätoiminnot
(1) yksittäinen ja jatkuva;
(2) vastaaminen laserille, jotka vaihtelevat komentoja ja voi lopettaa aina STOP -komennon mukaan;
(3) lähtöetäisyystiedot ja tilatiedot kerran pulssia kohti etäisyyden mittauksen aikana;
(4) se voi raportoida siirrettävien laserpulssien kumulatiivisen määrän (ei virran menettämistä);
(5) etäisyysvalinta, etu- ja takakohteen osoitus;
(6) Itsetestaustoiminto.
(2) vastaaminen laserille, jotka vaihtelevat komentoja ja voi lopettaa aina STOP -komennon mukaan;
(3) lähtöetäisyystiedot ja tilatiedot kerran pulssia kohti etäisyyden mittauksen aikana;
(4) se voi raportoida siirrettävien laserpulssien kumulatiivisen määrän (ei virran menettämistä);
(5) etäisyysvalinta, etu- ja takakohteen osoitus;
(6) Itsetestaustoiminto.
Tuotteen suorituskykyindeksi
| Esine | Tekninen parametri | Ohje |
| Malli | STA-B40X | |
| Toimiva aallonpituus | 1535 ± 5nm | |
| Silmien turvallisuus | Luokka 1 (IEC 60825-1) | |
| Aukon vastaanottaminen | Φ16mm | |
| Päästö | Φ13mm | |
| Etäisyys | 30-8000m | |
| Etäisyys | ≥8000m | Max, heijastavuus: 0,9, tarkkailijan näkyvyys 25 km |
| ≥6000m | Suuret rakennuskohteet, heijastavuus: 0,6, tarkkailijan näkyvyys 20 km | |
| ≥4000m | Naton kohde | |
| ≥2000m | Ihmisen kohde | |
| ≥1200m | UAV -tavoite | |
| Mini -alue | 30m |
|
| Monitasoinen havaitseminen | Enintään 3 tavoitetta |
|
| Etäisyysresoluutio | 20m |
|
| Etäisyystarkkuus | ± 1m | 3D |
| Etäisyystaajuus | 1 ~ 10 Hz säädettävä |
|
| Tarkkuusaste | ≥98% |
|
| Väärä hälytysnopeus | 1% |
|
| Erilainen kulma | ≤0,6 mrad |
|
| Viestintärajapinta | TTL | RS422/RS232 -rajapinta voidaan räätälöidä |
| Jännite | DC4.5 ~ 16V |
|
| Virrankulutus | ≤1,2W (@1Hz) | Työvoima |
| ≤5W@12V | Huippuvoima | |
| Laser -optisen akselin vakaus | ≤0,05 mrad |
|
| Rinnakkaisvirhe | ≤0,3 mrad | Optisen akselin rinnakkaisuusvirhe asennusviitteeseen |
| Mekaaninen shokki | 75 g, 1 ms |
|
| Työlämpötila | -40 ℃~+70 ℃ |
|
| Säilytyslämpötila | -55 ℃~+75 ℃ |
|
| Luotettavuus | MTBF ≥ 1500h |
|
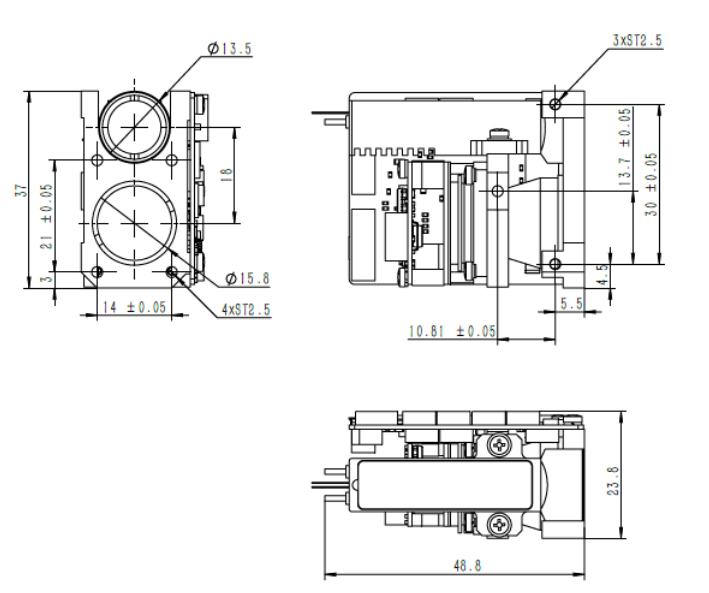
| Koko | ≤19x24x37mm |
|
| Paino | ≤50 g |
|
| Päätoiminto | Ensimmäinen ja viimeinen tavoite, monitasoinen, etäisyys selektiivisyys | |
Huomautuksia:
1) Naton kohteen koko 2,3 m × 2,3 m; Ihmisen tavoitekoko 0,5 m × 1,7 m; UAV -kohteen koko 0,2 M × 0,3 m; Heijastavuus 30%, kosteus in≤80%, tarkkailijan näkyvyys ≥ 12 km
Rakenteen asennusrajapinta
Sähkörajapinnan vaatimukset
Viestinnän käyttöliittymä: UART (TTL_3.3 V), 115200 bps, 1 Käynnistysbitti, 8 databittiä, 1 lopetus ei, ei pariteettibittiä;
Taulukko 1 Ydin määritelmä
Taulukko 1 Ydin määritelmä
| Nasta | Määritelmä | Linjaväri | Muistiinpanot |
| 1 | Virtalähde + | Punainen | 4,5-16 V |
| 2 | Virtalähde - | Musta | Hölynpöly |
| 3 | Power_on | Valkoinen | Teho TTL_3.3V -taso, moduuli päällä (> 2,7 V), moduuli pois päältä (<0,3 V) |
| 4 | Uart_tx | Keltainen | Sarjaportin lähettäjä |
| 5 | Uart_rx | Vihreä | Sarjaporttivastaanotin |
| 6 | Hölynpöly | Musta | Sarjasatama |
OEM/ODM -moduulit ja mukautetut ratkaisut
B40X on suunniteltu järjestelmäintegraattoreille, jotka etsivät kätevää, tehokasta ja kompaktia laserliuosta. Se tarjoaa luotettavan suorituskyvyn monissa sovelluksissa.
Se on hyvin pieni, erittäin kevyt, on alhainen virrankulutus ja sitä voidaan mitata pitkän matkan aikana. Se sopii kädessä pidettävään laitteeseen (lämpökuvaus), aseen kiinnityssovelluksiin, kannettaviin järjestelmiin ja kevyisiin anturipakoihin ja miehittämättömiin ilma -ajoneuvoihin tai UGV: iin.
Se on hyvin pieni, erittäin kevyt, on alhainen virrankulutus ja sitä voidaan mitata pitkän matkan aikana. Se sopii kädessä pidettävään laitteeseen (lämpökuvaus), aseen kiinnityssovelluksiin, kannettaviin järjestelmiin ja kevyisiin anturipakoihin ja miehittämättömiin ilma -ajoneuvoihin tai UGV: iin.
Kommunikointiprotokolla
1. Lähetysprotokolla: asynkroninen sarjaviestintä;
2. Porttinopeus: 115200;
3. Data -bitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yhden pysäytysbitti, virheellinen tarkistus;
4. Tietorakenne: Tiedot koostuu otsikon tavusta, komentoosasta, datan pituudesta, parametrien osasta ja tarkista tavu;
5. Viestintätila: Pääohjaus lähettää ohjauskomennot etäisyyskoneeseen, ja etäisyyskone vastaanottaa ja suorittaa ohjeet. Aluetilassa etäisyyslaite lähettää tietoa ja tilannetta takaisin ylemmälle tietokoneelle etäisyyden syklin mukaan. Viestintämuoto ja komennon sisältö näkyy seuraavassa taulukossa.
A) Pääohjaus lähettää
Lähettävän viestin muoto on seuraava:
2. Porttinopeus: 115200;
3. Data -bitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yhden pysäytysbitti, virheellinen tarkistus;
4. Tietorakenne: Tiedot koostuu otsikon tavusta, komentoosasta, datan pituudesta, parametrien osasta ja tarkista tavu;
5. Viestintätila: Pääohjaus lähettää ohjauskomennot etäisyyskoneeseen, ja etäisyyskone vastaanottaa ja suorittaa ohjeet. Aluetilassa etäisyyslaite lähettää tietoa ja tilannetta takaisin ylemmälle tietokoneelle etäisyyden syklin mukaan. Viestintämuoto ja komennon sisältö näkyy seuraavassa taulukossa.
A) Pääohjaus lähettää
Lähettävän viestin muoto on seuraava:
| STX0 | Cmd | Lensi | Data1h | Data1L | Pakka |
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu | A5 (H) |
|
| 2 | Cmd | CW | Katso taulukko 3 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | Data | parametri | Katso taulukko 3 |
|
| 5 | saapuminen |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Komento kuvataan seuraavasti:
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt etäisyydelle
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt etäisyydelle
| tilausnumero | CW | funktio | tavu | huomautukset | pituus | Esimerkkikoodi |
| 1 | 0x00 | lopettaa | Datah = 00 (h) datal = 00 (h) | Etäisyysmittari lopettaa mittauksen | Kuusi tavua | A5 00 02 00 A7 |
| 2 | 0x01 | Yksiväli | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 01 02 00 00 A6 |
| 3 | 0x02 | Jatkuva | Datah = xx (h) datal = yy (h) | Tiedot kuvaavat etäisyyttä, MS: ssä | Kuusi tavua | A5 02 02 03 E8 4E (1Hz aina) |
| 4 | 0x03 | itsensä tarkistaminen | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 02 02 00 A4 |
| 5 | 0x04 | Aseta lähin etäisyys valintaan | Datah = xx (h) datal = yy (h) | Tiedot kuvaavat sokean vyöhykkeen arvoa, yksikkö 1m | Kuusi tavua | A5 04 02 00 64 C7 (100m on lähin etäisyys) |
| 6 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | Datah = 00 (h) datal = 00 (h) | Kumulatiivinen määrä valonlähtökyselyjä | Kuusi tavua | A5 06 02 00 A1 |
| 7 | 0x11 | APD -voima on päällä | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 11 02 00 B6 |
| 8 | 0x12 | APD -voima on pois päältä | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 12 02 00 B5 |
| 9 | 0xeb | Numerokysely | Datah = 00 (h) datal = 00 (h) | Numerokysely | Kuusi tavua | A5 EB 02 00 00 4C |
a) Pääohjaus vastaanottaa muodon
Vastaanotetun viestin muoto on seuraava:
Vastaanotetun viestin muoto on seuraava:
| STX0 | Cmd | Lensi | DATAn | Päivämäärä0 | Pakka |
Taulukko 4 Vastaanotetun viestien muotokuva
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu 1 | A5 (H) |
|
| 2 | Cmd_jg | Datakomennon sana | Katso taulukko 5 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | DN | parametri | Katso taulukko 5 |
|
| 5 | D0 |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Pääohjaus vastaanottava tila Kuvaus:
Taulukossa 5 kuvataan etäisyysmittarin lähettämä datasana pääohjaimeen
Taulukossa 5 kuvataan etäisyysmittarin lähettämä datasana pääohjaimeen
| tilausnumero | CW | funktio | tavu | huomautukset | kokonaispituus |
| 1 | 0x00 | lopettaa | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua |
| 2 | 0x03 | itsensä tarkistaminen | D8 ~ d1 | D8-D7: -5 V JOLLISUUS, YKSIKKÖ 0.01V.D6-D5: Sokea spot-arvo, Yksikkö 1MD4: APD: n korkeajännitearvo, yksikkö V; D3: hiilityyppi, osoittaen APD: n lämpötilan, yksikkö: aste Celsius; D2-D1: +5 V jännite, yksikkö 0,01 V | 12 tavua |
| 3 | 0x04 | Etäisyys lähimpään pääsyasetukseen, yksikkö m | D1 D0 | Tiedot kuvaavat lähimmän etäisyysarvoa, yksikköä 1m; aloita korkea ja pää matala | Kuusi tavua |
| 4 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | D3 ~ d0 | Tiedot ilmaisevat valojen lukumäärän, 4 tavua, korkealla tavulla ensin | Seitsemän tavua |
| 5 | 0x11 | APD -voima on päällä | D1 = 00 (H) d0 = 00 (H) | APD -voima on päällä | Kuusi tavua |
| 6 | 0x12 | APD -virta | D1 = 00 (H) d0 = 00 (H) | APD -voima on pois päältä | Kuusi tavua |
| 7 | 0xed | Ylityöt | 0x00 0x00 | Laser on laserin työsuojauksessa, eikä sitä voida mitata. | Kuusi tavua |
| 8 | 0xee | Tehokkuusvirheet | 0x00 0x00 |
|
Kuusi tavua |
| 9 | 0xef | Sarjaporttiviestinnän aikakatkaisu | 0x00 0x00 |
|
Kuusi tavua |
| 10 | 0x01 | Yhden alueen mittaus (yksi tavoite, nolla toiselle ja kolmannelle tavoitteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat lähellä Fard9 (Bit7-bit00) lipun tavua: D9 on seitsemäs sijainti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, viides sijainti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on aikakatkaisun lipun neljäs bitti, 1: Normaali, 0: aikakatkaisu9 on virheellinen kolmannessa asennossa (asetettu arvoon 1); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Edellisellä tavoitteella on aikaisempi, 0: Ei aikaisempaa kohdetta (kohde sokealla alueella) .D9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Seuraava kohde on 0: Ei myöhempää kohdetta (pääkohde pääkohde on seuraava kohde) | 14 tavua |
| 11 | 0x02 | Jatkuva etäisyys (yksi kohde, nolla toiselle ja kolmannelle tavoitteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat lähellä Fard9 (Bit7-bit00) lipun tavua: D9 on seitsemäs bitti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, viides sijainti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on aikakatkaisun lipun neljäs bitti, 1: normaali, 0: aikakatkaisu9 on virheellinen kolmannessa asennossa (asetettu arvoon 1); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Edellisellä tavoitteella on aikaisempi, 0: Ei aikaisempaa kohdetta (kohde sokealla alueella) .D9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Seuraava kohde on 0: Ei myöhempää kohdetta (pääkohde pääkohde on seuraava kohde) | 14 tavua |
| 12 | 0xeb | Numerokysely | D17 …… D0 | D17 D16 D15 D14 D13 D12 Koko konemalli koodattu11D10 Product NumberD9 D6 -versiod5 D4 APD NumberD3 D2 Laser Numberversion D1 FPGA: n | 22 tavua |
| HUOMAUTUS: ① määrittelemätön datatavu/bitti, oletus on 0; | |||||
Hot Tags: 4 km silmän turvallinen laser-etäisyysmoduuli (LRF), valmistajat, toimittajat, tehdas, Kiina, valmistettu Kiinassa, räätälöity, korkealaatuinen
Aiheeseen liittyvä luokka
905 nm:n laseretäisyysmittarimoduuli
1535 nm:n laseretäisyysmittarimoduuli
1570nm laseretäisyysmittari
1,54UM Laser Rangefinder -moduuli
1064nm Laser Target Merkitsaattori
Drone -stSTEM -moduuli
Range Lidar-moduuli
Lähetä kysely
Ole hyvä ja lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.