Koti
>
Tuotteet > Laseretäisyysmittari moduuli > Drone -stSTEM -moduuli > 2MRAD 1 km Laser -etäisyysmittarin moduuli anti -drone -stSTEM: lle







2MRAD 1 km Laser -etäisyysmittarin moduuli anti -drone -stSTEM: lle
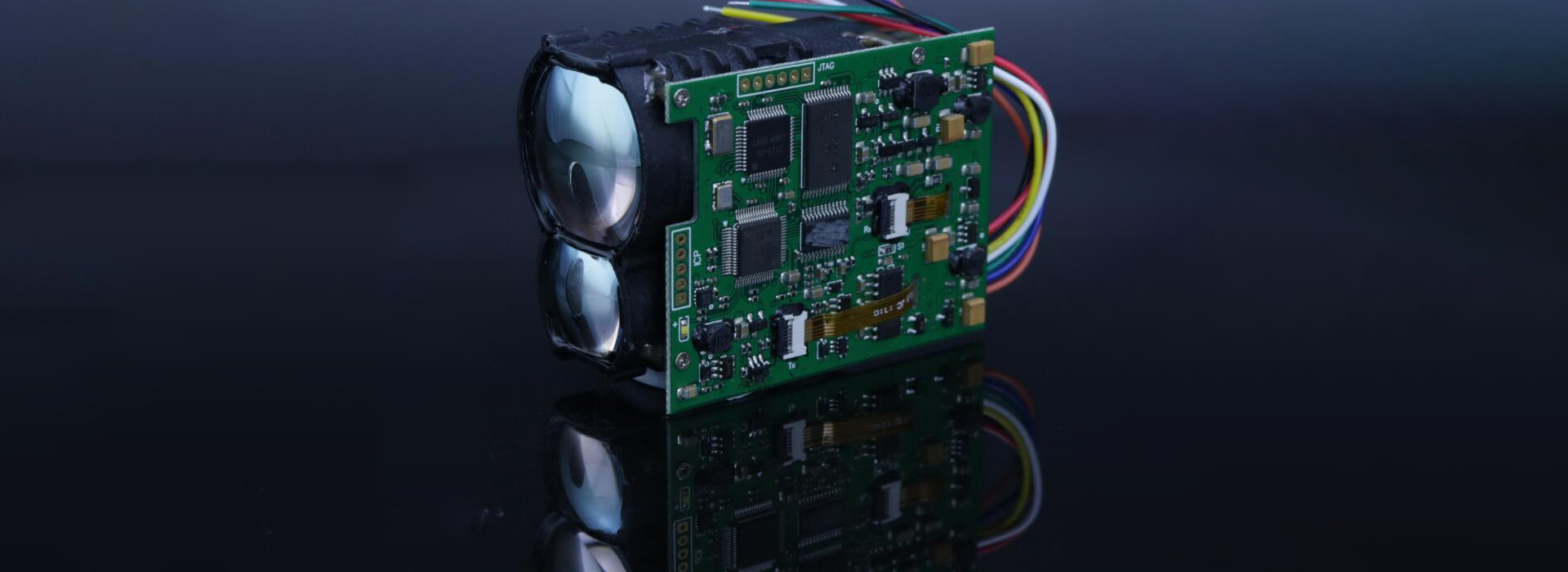
Kompakti STA-WR1000X Laser Rangefinder -moduuli on erittäin sopiva integrointiin armeijan ja merivoimien ilmapuolustusjärjestelmiin. Etäisyyden mittausmoduuli hyväksyy edistynein diodi pumpattu Erbium -lasilaseri, jolla on korkea saatavuus ja alhaiset huoltokustannukset. Sen 2MRAD-erokulma voi mitata UAV: t, joiden poikkileikkaus on 0,1 ㎡ jopa 1000 metriä, mikä tekee siitä tärkeän komponentin anti-drone-järjestelmissä.
Lähetä kysely
Tuotteen Kuvaus
1) yksittäinen ja jatkuvaa etäisyyttä;
2) vastaaminen laserille, jotka ulottuvat komentoihin ja pysähtyen milloin tahansa STOP -komennon mukaan;
3) lähtö etäisyystiedot ja tilatiedot kerran pulssia kohti;
4) Se voi raportoida siirrettyjen laserpulssien kumulatiivisen määrän (ei virran menettämistä);
5) etäisyysvalinta ennen ja jälkeen kohteen osoituksen;
6) Itsetestaustoiminto.
2) vastaaminen laserille, jotka ulottuvat komentoihin ja pysähtyen milloin tahansa STOP -komennon mukaan;
3) lähtö etäisyystiedot ja tilatiedot kerran pulssia kohti;
4) Se voi raportoida siirrettyjen laserpulssien kumulatiivisen määrän (ei virran menettämistä);
5) etäisyysvalinta ennen ja jälkeen kohteen osoituksen;
6) Itsetestaustoiminto.
Laservälitystoiminto;
Lasersäteilytystoiminto;
Valoelektrisen eristyssignaalin liipaisin;
purettu kohdistuspalkki;
ulkoinen liipaisimen funktio;
Lasersäteilytystoiminto;
Valoelektrisen eristyssignaalin liipaisin;
purettu kohdistuspalkki;
ulkoinen liipaisimen funktio;
Tärkeimmät tekniset indikaattorit
| Optinen indeksi | |
| Aallonpituus | 1535 nm ± 5nm |
| Laser -divergenssikulma | ≤2MRAD |
| Tehokas aukko | 25 mm |
| Etäisyystaajuus | Yksi, 1 ~ 10 Hz säädettävä |
| Etäisyys | Näkyvyys ≥ 12 km, kohteen heijastavuus ≥ 0,3, kosteus ≤ 80%, UAV etäisyys (0,25 m × 0,25 m) ≥ 2 km |
| Etäisyystarkkuus | ≤ ± 1 m (rms) |
| Tarkkuusmittaus | ≥98% |
| Väärä hälytysnopeus | ≤1% |
| Vähimmäismittausalue | ≤30m |
| Laser -akselin vakaus | ≤0,05 mrad |
| Optinen akseli on yhdensuuntainen asennusviitteen kanssa | ≤0,3 mrad |
| Mekaaniset indikaattorit | |
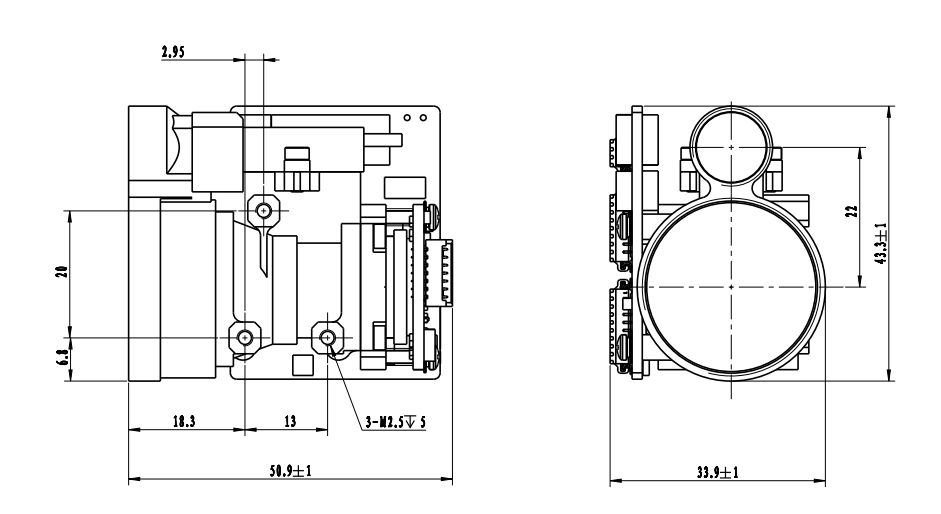
| Koko | ≤52 mm × 45 mm × 35 mm |
| Paino | ≤75 g |
| Sähköindikaattorit | |
| Toimittaa sähkö | DC9V ~ 32V |
| Virran hajoaminen | Work less than 3W@10Hz, peak power consumption less than 5W |
| Rajapinta | RS422 -rajapinta, 115200bps |
| Virta ohjausrajapinnalla | Kun turvallinen etäisyys saavutetaan, virta päälle ja käytä sitä; tai pienitehotilassa sen käyttötilan hallitsemiseksi |
| Piirilevyn suojaus | Kun piirilevyn suunnittelu ja virheenkorjaus on saatu päätökseen, sen anti-Shock-maalin päällystämistä ja "kolme suojaa" -käsittelyä vaaditaan |
| Ympäristön soveltuvuus | |
| Työlämpötila | -40 ℃ -65 ℃ |
| Säilytyslämpötila | -55 ℃ -70 ℃ |
| Väristyä | GJB150.16 A-2009 "Sotilaslaitteiden laboratorio Ympäristötestien menetelmät-värähtelytesti" |
| Riisua | GJB150.18 A-2009 "Sotilaslaitteiden laboratorion ympäristötestausmenetelmä-Vaikutustesti" |
Huomaa:
1. Ranka -alue Kuvaus: Alue muuttuu erilaisissa testiolosuhteissa ja testikohteissa, jos havaitset erityiset tavoitteet, ota yhteyttä myyntipuolelle vahvistaaksesi;
2. pienin alue: 30m-100 metrin vaihtelut, sitä suositellaan 50 metriin normaalin käytön jälkeen; Laserenergian takia on suuri, läheinen alue käyttää ilmaisimen sirua, joten virheenkorjauksessa tuo hyvä peilikannu estämään ilmaisimen siru palavat.
2. pienin alue: 30m-100 metrin vaihtelut, sitä suositellaan 50 metriin normaalin käytön jälkeen; Laserenergian takia on suuri, läheinen alue käyttää ilmaisimen sirua, joten virheenkorjauksessa tuo hyvä peilikannu estämään ilmaisimen siru palavat.
Mekaaninen rakenteen kaavio
Sähkörajapinnan vaatimukset
Viestintärajapinta: RS422,115200bps, 1 Käynnistysbitti, 8 databittiä, 1 pysäytysbitti, ei pariteetti;
Taulukko 2 Liitäntälinjan määritelmä
Taulukko 2 Liitäntälinjan määritelmä
| Nasta | määritelmä | funktio | huomautukset |
| 1 | RX+ | RS422 saa positiivista |
|
| 2 | RX- | RS422 vastaanottaa negatiivisia |
|
| 3 | TX- | RS422 lähettää negatiivista |
|
| 4 | TX+ | RS422 lähettää positiivista |
|
| 5 | Hölynpöly |
|
|
| 6 | Vee | 9-32V |
|
| 7 | Hölynpöly |
|
|
| 8 | PWR_EN | velvoittaa | Unenhallinta |
1. Muutamia tietoja
1) STA-WR1000X-moduulia käytetään erityisesti UAV: n etäisyyden mittaamiseen;
2) Tekniset tiedot voidaan tarkistaa ajoittain, vahvista tuotteiden koon eritelmät myyjän kanssa ennen tilauksen tekemistä;
3) ELÄMÄN MODUULI käyttää yhtenäistä viestintäprotokollaa ja ylempää tietokonetta. Jos joudut soittamaan sille, ota yhteyttä myyjään.
2. Kommunikointiprotokolla
1) siirtoprotokolla: asynkroninen sarjaviestintä;
2) Baud -arvo: 115200;
3) Tietobittit: 10 bittiä: yksi aloitusbitti, 8 databittiä, 1 pysäytysbitti, virheellinen tarkistus;
4) tietorakenne: Tiedot koostuu ensimmäisestä tavusta, komentoosasta, datan pituudesta, parametriosasta ja tarkistusvuosta;
5) Viestintätila: Master lähettää ohjauskomennot etäisyyskoneeseen, ja etäisyyskone vastaanottaa ja suorittaa ohjeet. Aluetilassa etäisyyslaite lähettää tietoa ja tilannetta takaisin ylemmälle tietokoneelle etäisyyden syklin mukaan. Viestintämuoto ja komennon sisältö näkyy seuraavassa taulukossa.
a) Pääohjaus lähettää
Lähettävän viestin muoto on seuraava:
1) STA-WR1000X-moduulia käytetään erityisesti UAV: n etäisyyden mittaamiseen;
2) Tekniset tiedot voidaan tarkistaa ajoittain, vahvista tuotteiden koon eritelmät myyjän kanssa ennen tilauksen tekemistä;
3) ELÄMÄN MODUULI käyttää yhtenäistä viestintäprotokollaa ja ylempää tietokonetta. Jos joudut soittamaan sille, ota yhteyttä myyjään.
2. Kommunikointiprotokolla
1) siirtoprotokolla: asynkroninen sarjaviestintä;
2) Baud -arvo: 115200;
3) Tietobittit: 10 bittiä: yksi aloitusbitti, 8 databittiä, 1 pysäytysbitti, virheellinen tarkistus;
4) tietorakenne: Tiedot koostuu ensimmäisestä tavusta, komentoosasta, datan pituudesta, parametriosasta ja tarkistusvuosta;
5) Viestintätila: Master lähettää ohjauskomennot etäisyyskoneeseen, ja etäisyyskone vastaanottaa ja suorittaa ohjeet. Aluetilassa etäisyyslaite lähettää tietoa ja tilannetta takaisin ylemmälle tietokoneelle etäisyyden syklin mukaan. Viestintämuoto ja komennon sisältö näkyy seuraavassa taulukossa.
a) Pääohjaus lähettää
Lähettävän viestin muoto on seuraava:
| STX0 | Cmd | Lensi | Data1h | Data1L | Pakka |
Taulukko 2 Muoto Kuvaus lähetetystä viestistä
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu | A5 (H) |
|
| 2 | Cmd | CW | Katso taulukko 3 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | Data | parametri | Katso taulukko 3 |
|
| 5 | saapuminen |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Komento kuvataan seuraavasti:
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt etäisyydelle
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt etäisyydelle
| tilausnumero | CW | funktio | tavu | huomautukset | pituus | Esimerkkikoodi |
| 1 | 0x00 | lopettaa | Datah = 00 (h) datal = 00 (h) | Etäisyysmittari lopettaa mittauksen | Kuusi tavua | A5 00 02 00 A7 |
| 2 | 0x01 | Yksiväli | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 01 02 00 00 A6 |
| 3 | 0x02 | Jatkuva | Datah = xx (h) datal = yy (h) | Tiedot kuvaavat etäisyyttä, MS: ssä | Kuusi tavua | A5 02 02 03 E8 4E (1Hz aina) |
| 4 | 0x03 | itsensä tarkistaminen | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 02 02 00 A4 |
| 5 | 0x04 | Aseta lähin etäisyys valintaan | Datah = xx (h) datal = yy (h) | Tiedot kuvaavat sokean vyöhykkeen arvoa, yksikkö 1m | Kuusi tavua | A5 04 02 00 64 C7 (100m on lähin etäisyys) |
| 6 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | Datah = 00 (h) datal = 00 (h) | Kumulatiivinen määrä valonlähtökyselyjä | Kuusi tavua | A5 06 02 00 A1 |
| 7 | 0x11 | APD -voima on päällä | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 11 02 00 B6 |
| 8 | 0x12 | APD -voima on pois päältä | Datah = 00 (h) datal = 00 (h) |
|
Kuusi tavua | A5 12 02 00 B5 |
| 9 | 0xeb | Numerokysely | Datah = 00 (h) datal = 00 (h) | Numerokysely | Kuusi tavua | A5 EB 02 00 00 4C |
b) Pääohjaus vastaanottaa muodon
Vastaanotetun viestin muoto on seuraava:
Vastaanotetun viestin muoto on seuraava:
| STX0 | Cmd | Lensi | DATAn | Päivämäärä0 | Pakka |
Taulukko 4 Vastaanotetun viestien muotokuva
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu 1 | A5 (H) |
|
| 2 | Cmd_jg | Datakomennon sana | Katso taulukko 5 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | DN | parametri | Katso taulukko 5 |
|
| 5 | D0 |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Pääohjaus vastaanottava tila Kuvaus:
Taulukossa 5 kuvataan etäisyysmittarin lähettämä datasana pääohjaimeen
Taulukossa 5 kuvataan etäisyysmittarin lähettämä datasana pääohjaimeen
| tilausnumero | CW | funktio | tavu | huomautukset | kokonaispituus |
| 1 | 0x00 | lopettaa | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua |
| 2 | 0x03 | itsensä tarkistaminen | D8 ~ d1 | D8-D7: -5 V JOLLISUUS, YKSIKKÖ 0.01V.D6-D5: Sokea spot-arvo, Yksikkö 1MD4: APD: n korkeajännitearvo, yksikkö V; D3: hiilityyppi, osoittaen APD: n lämpötilan, yksikkö: aste Celsius; D2-D1: +5 V jännite, yksikkö 0,01 V | 12 tavua |
| 3 | 0x04 | Etäisyys lähimpään pääsyasetukseen, yksikkö m | D1 D0 | Tiedot kuvaavat lähimmän etäisyysarvoa, yksikköä 1m; aloita korkea ja pää matala | Kuusi tavua |
| 4 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | D3 ~ d0 | Tiedot ilmaisevat, kuinka monta kertaa valoa säteilee, 4 tavua, korkealla tavulla ensin | Seitsemän tavua |
| 5 | 0x11 | APD -voima on päällä | D1 = 00 (H) d0 = 00 (H) | APD -voima on päällä | Kuusi tavua |
| 6 | 0x12 | APD -virta | D1 = 00 (H) d0 = 00 (H) | APD -virta | Kuusi tavua |
| 7 | 0xed | Ylityöt | 0x00 0x00 | Laser on laserin työsuojauksessa, eikä sitä voida mitata. | Kuusi tavua |
| 8 | 0xee | Tehokkuusvirheet | 0x00 0x00 |
|
Kuusi tavua |
| 9 | 0xef | Sarjaporttiviestinnän aikakatkaisu | 0x00 0x00 |
|
Kuusi tavua |
| 10 | 0x01 | Yhden alueen mittaus (yksi tavoite, nolla toiselle ja kolmannelle tavoitteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat lähellä Fard9 (Bit7-bit00) lipun tavua: D9 on seitsemäs bitti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, viides sijainti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on aikakatkaisun lipun neljäs bitti, 1: normaali, 0: aikakatkaisu9 on virheellinen kolmannessa asennossa (asetettu arvoon 1); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Edellisellä tavoitteella on aikaisempi, 0: Ei aikaisempaa kohdetta (kohde sokealla alueella) .D9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Seuraava kohde on 0: Ei myöhempää kohdetta (pääkohde pääkohde on seuraava kohde) | 14 tavua |
| 11 | 0x02 | Jatkuva etäisyys (yksi kohde, nolla toiselle ja kolmannelle tavoitteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat lähellä Fard9 (Bit7-bit00) lipun tavua: D9 on seitsemäs bitti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, 5. bitti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on aikakatkaisun lipun neljäs bitti, 1: normaali, 0: aikakatkaisu9 on virheellinen kolmannessa asennossa (asetettu arvoon 1); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Edellisellä tavoitteella on aikaisempi, 0: Ei aikaisempaa kohdetta (kohde sokealla alueella) .D9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Seuraava kohde on 0: Ei myöhempää kohdetta (pääkohde pääkohde on seuraava kohde) | 14 tavua |
| 12 | 0xeb | Numerokysely | D17 …… D0 | D17 D16 D15 D14 D13 D12 Koko konemalli koodattu11D10 Product NumberD9 D6 -versiod5 D4 APD NumberD3 D2 Laser Numberversion D1 FPGA: n | 22 tavua |
| HUOMAUTUS: ① määrittelemätön datatavu/bitti, oletus on 0; | |||||
Hot Tags: 2MRAD 1 km Laser -etäisyysmoduuli anti -drone -stSTEM: lle, valmistajat, toimittajat, tehdas, Kiina, valmistettu Kiinassa, räätälöity, korkealaatuinen
Aiheeseen liittyvä luokka
905 nm:n laseretäisyysmittarimoduuli
1535 nm:n laseretäisyysmittarimoduuli
1570nm laseretäisyysmittari
1,54UM Laser Rangefinder -moduuli
1064nm Laser Target Merkitsaattori
Drone -stSTEM -moduuli
Range Lidar-moduuli
Lähetä kysely
Ole hyvä ja lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.