Koti
>
Tuotteet > Laseretäisyysmittari moduuli > Drone -stSTEM -moduuli > 2mrad 2km laseretäisyysmittari moduuli Anti drone ststem








2mrad 2km laseretäisyysmittari moduuli Anti drone ststem
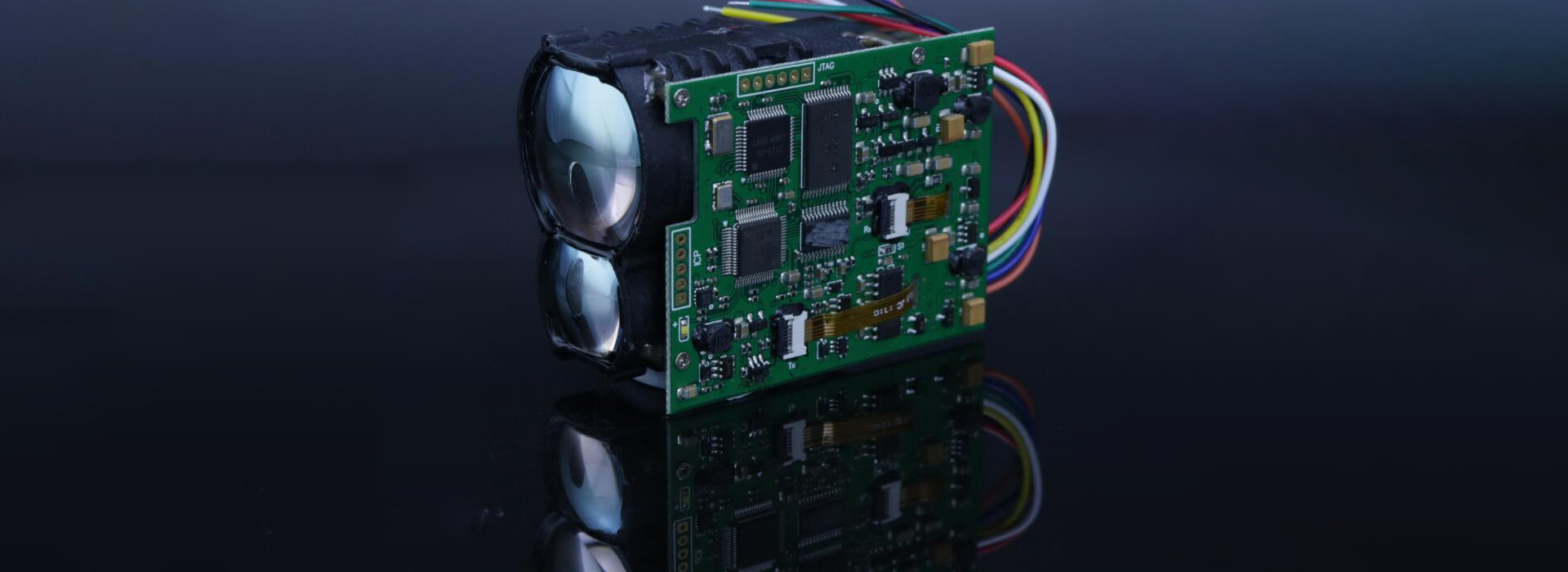
Kompakti STA-WR2000X laseretäisyysmittarimoduuli sopii erinomaisesti integroitavaksi armeijan ja laivaston ilmapuolustusjärjestelmiin. Etäisyysmittausmoduuli käyttää edistyneintä diodipumpattua erbiumlasilaseria, jolla on korkea saatavuus ja alhaiset ylläpitokustannukset. Sen 2 mrad:n erotuskulma pystyy mittaamaan UAV:ita, joiden poikkileikkaus on 0,1 ㎡ 2000 metriin asti, mikä tekee siitä tärkeän osan drone-järjestelmistä.
Lähetä kysely
Tuotteen Kuvaus
1) Yksittäinen ja jatkuva etäisyys;
2) Vastaaminen laseretäisyyskäskyihin ja etäisyysmittauksen pysäyttäminen milloin tahansa pysäytyskomennon mukaisesti;
3) Lähettää etäisyystiedot ja tilatiedot kerran pulssia kohden mittauksen aikana;
4) Se voi raportoida lähetettyjen laserpulssien kumulatiivisen määrän (ei virrankatkaisua);
5) Etäisyyden valinta ennen ja jälkeen kohteen osoittamisen;
6) Itsetestaustoiminto.
2) Vastaaminen laseretäisyyskäskyihin ja etäisyysmittauksen pysäyttäminen milloin tahansa pysäytyskomennon mukaisesti;
3) Lähettää etäisyystiedot ja tilatiedot kerran pulssia kohden mittauksen aikana;
4) Se voi raportoida lähetettyjen laserpulssien kumulatiivisen määrän (ei virrankatkaisua);
5) Etäisyyden valinta ennen ja jälkeen kohteen osoittamisen;
6) Itsetestaustoiminto.
| Optinen indeksi | |
| Aallonpituus | 1535nm±5nm |
| Laserhajotuskulma | ≤ 2 mrad |
| Tehokas vastaanottoaukko | 56 mm |
| Aluetaajuus | Yksittäinen, 1-10 Hz säädettävissä |
| Alue | Näkyvyys ≥ 12 km, tavoiteheijastuskyky ≥ 0,3, kosteus ≤ 80 %, UAV:n toimintaetäisyys (0,25m × 0,25m) ≥ 2 km |
| Alueen tarkkuus | ≤±1m (RMS) |
| Tarkkuusmittaus | ≥ 98 % |
| Väärien hälytysten määrä | ≤ 1 % |
| Minimimittausalue | ≤50m |
| Laserakselin vakaus | ≤0,05 mrad |
| Optinen akseli on yhdensuuntainen asennusohjeen kanssa | ≤0,3 mrad |
| Mekaaniset indikaattorit | |
| Koko | ≤90×63×82mm |
| Paino | saapuminen |
| Sähköiset indikaattorit | |
| Tarjoa sähköä | DC9V~32V |
| Tehon hajaantuminen | Työskentele alle 3W@10Hz, huippuvirrankulutus alle 5W |
| Käyttöliittymä | RS422-liitäntä, 115200bps |
| Ohjausliitäntä päälle | Kun turvallinen etäisyys saavutetaan, kytke virta päälle ja käytä sitä; tai virransäästötilassa sen toimintatilan ohjaamiseksi |
| Állítsa be a kijelöléshez legközelebbi távolságot | Kun piirilevyn suunnittelu ja virheenkorjaus on valmis, on pinnoitettava iskunestomaali ja suoritettava "kolme suojaus" |
| Ympäristösoveltuvuus | |
| Työlämpötila | -40 ℃ - 65 ℃ |
| Varastointilämpötila | -55 ℃ - 70 ℃ |
| Värinä | GJB150.16 A-2009 "Sotilaskaluston laboratorion ympäristötestausmenetelmät - tärinätesti" |
| Ripsiä | GJB150.18 A-2009 "Sotilaskaluston laboratorion ympäristötestimenetelmä-iskutesti" |
Huomautus:
1. Range-alueen kuvaus: valikoima muuttuu eri testiolosuhteissa ja testikohteissa, jos havaitset erikoiskohteita, ota yhteyttä myyntiin vahvistaaksesi;
D8-D7: -5V jännite, yksikkö 0,01V.D6-D5: Kuolleen kulman arvo, yksikkö 1mD4: APD korkea jännite, yksikkö V;D3: char-tyyppi, ilmaisee APD-lämpötilan, yksikkö: Celsius-astetta;D2-D1: +5V jännite, yksikkö 0,01V
1. Range-alueen kuvaus: valikoima muuttuu eri testiolosuhteissa ja testikohteissa, jos havaitset erikoiskohteita, ota yhteyttä myyntiin vahvistaaksesi;
D8-D7: -5V jännite, yksikkö 0,01V.D6-D5: Kuolleen kulman arvo, yksikkö 1mD4: APD korkea jännite, yksikkö V;D3: char-tyyppi, ilmaisee APD-lämpötilan, yksikkö: Celsius-astetta;D2-D1: +5V jännite, yksikkö 0,01V
Mekaaninen rakennekaavio

Ulkoinen käyttöliittymä
| Pin | Määritelmä | Toiminto | Huomautuksia |
| 1 | RX+ | RS422 vastaanotin + | Sininen |
| 2 | RX- | RS422 vastaanotin - | Vihreä |
| 3 | TX- | RS422 siirto - | Violetti |
| 4 | TX+ | RS422 vaihteisto + | Keltainen |
| 5 | GND | Tiedonsiirtomaajohto | Valkoinen |
| 6 | VEE | Virtalähde + | Punainen |
| 7 | GND | Virtalähde - | Musta |
| 8 | PWR FI | / | Tuhka |
3. Databitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yksi lopetusbitti, virheellinen vahvistus;
Viestintäprotokolla
1. Lähetysprotokolla: asynkroninen sarjaliikenne;
2. Porttihinta: 115200;
3. Databitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yksi lopetusbitti, virheellinen vahvistus;
4. Tietorakenne: Data koostuu otsikkotavusta, komentoosasta, datan pituudesta, parametriosasta ja tarkistustavusta;
5. Tiedonsiirtotila: pääohjain lähettää ohjauskomennot etäisyysmittauskoneelle ja mittauskone vastaanottaa ja suorittaa käskyt. Etäisyystilassa etäisyysmittauskone lähettää mittauskoneen tiedot ja tilan takaisin ylemmälle tietokoneelle etäisyysmittausjakson mukaisesti. Viestintämuoto ja komennon sisältö näkyvät seuraavassa taulukossa.
A) Pääohjaus lähettää
2. Porttihinta: 115200;
3. Databitit: 10 bittiä: yksi aloitusbitti, 8 databittiä, yksi lopetusbitti, virheellinen vahvistus;
4. Tietorakenne: Data koostuu otsikkotavusta, komentoosasta, datan pituudesta, parametriosasta ja tarkistustavusta;
5. Tiedonsiirtotila: pääohjain lähettää ohjauskomennot etäisyysmittauskoneelle ja mittauskone vastaanottaa ja suorittaa käskyt. Etäisyystilassa etäisyysmittauskone lähettää mittauskoneen tiedot ja tilan takaisin ylemmälle tietokoneelle etäisyysmittausjakson mukaisesti. Viestintämuoto ja komennon sisältö näkyvät seuraavassa taulukossa.
A) Pääohjaus lähettää
Lähetettävän viestin muoto on seuraava:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Taulukko 2 Lähetetyn viestin muotokuvaus
| tilausnumero | nimi | selittää | koodi | huomautuksia |
| 1 | STX0 | Viestin aloituslippu | A5(H) |
|
| 2 | CMD | CW | Katso taulukko 3 |
|
| 3 | LEN | DL | Kaikkien tavujen määrä paitsi aloitusmerkki, komentosana ja tarkistussumma |
|
| 4 | DATAH | parametri | Katso taulukko 3 |
|
| 5 | saapuminen |
|
||
| 6 | CHK | XOR-vahvistus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat XOR-korjattuja |
|
Komento kuvataan seuraavasti:
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka isäntä lähettää etäisyysmittauskoneelle
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka isäntä lähettää etäisyysmittauskoneelle
| tilausnumero | CW | toiminto | datatavu | huomautuksia | pituus | Esimerkkikoodi |
| 1 | 0x00 | lopettaa | DATAH=00(H)DATAL=00(H) | Etäisyysmittari lopettaa mittaamisen | Kuusi tavua | A5 00 02 00 00 A7 |
| 2 | 0x01 | Yksittäinen ulottuvuus | DATAH=00(H)DATAL=00(H) |
|
Kuusi tavua | A5 01 02 00 00 A6 |
| 3 | 0x02 | Jatkuva etäisyys | DATAH=XX(H)DATAL=YY(H) | DATA kuvaa vaihteluväliä, ms | Kuusi tavua | A5 02 02 03 E8 4E (alue 1 Hz) |
| 4 | 0x03 | itsetarkistus | DATAH=00(H)DATAL=00(H) |
|
Kuusi tavua | A5 03 02 00 00 A4 |
| 5 | 0x04 | Aseta lähin etäisyys valintaan | DATAH=XX(H)DATAL=YY(H) | DATA kuvaa sokean alueen arvoa, yksikkö 1m | Kuusi tavua | A5 04 02 00 64 C7 (100m on lähin etäisyys) |
| 6 | 0x06 | Valon tehokyselyiden kumulatiivinen määrä | DATAH=00(H)DATAL=00(H) | Valon tehokyselyiden kumulatiivinen määrä | Kuusi tavua | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-virta on päällä | DATAH=00(H)DATAL=00(H) |
|
Kuusi tavua | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD-virta on pois päältä | DATAH=00(H)DATAL=00(H) |
|
Kuusi tavua | A5 12 02 00 00 B5 |
| 9 | 0xEB | Numerokysely | DATAH=00(H)DATAL=00(H) | Numerokysely | Kuusi tavua | A5 EB 02 00 00 4C |
a) Pääohjain vastaanottaa muotoa
Vastaanotetun viestin muoto on seuraava:
Vastaanotetun viestin muoto on seuraava:
| STX0 | CMD | LEN | DATAn | PÄIVÄYS0 | CHK |
Taulukko 4 Vastaanotettujen viestien muotokuvaus
| tilausnumero | nimi | selittää | koodi | huomautuksia |
| 1 | STX0 | Viestin aloituslippu 1 | A5(H) |
|
| 2 | CMD_JG | Datan komentosana | Katso taulukko 5 |
|
| 3 | LEN | DL | Kaikkien tavujen määrä paitsi aloitusmerkki, komentosana ja tarkistussumma |
|
| 4 | Dn | parametri | Katso taulukko 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR-vahvistus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat XOR-korjattuja |
|
Pääsäätimen vastaanottavan tilan kuvauksen:
Taulukko 5 kuvaa datasanan, jonka etäisyysmittari lähettää pääohjaimelle
Taulukko 5 kuvaa datasanan, jonka etäisyysmittari lähettää pääohjaimelle
| tilausnumero | CW | toiminto | datatavu | huomautuksia | Kokonaispituus |
| 1 | 0x00 | lopettaa | D1=00(H)D0=00(H) |
|
Kuusi tavua |
| 2 | 0x03 | itsetarkistus | D8-D1 | D8-D7: -5V jännite, yksikkö 0,01V.D6-D5: Kuolleen kulman arvo, yksikkö 1mD4: APD korkea jännite, yksikkö V;D3: char-tyyppi, ilmaisee APD-lämpötilan, yksikkö: Celsius-astetta;D2-D1: +5V jännite, yksikkö 0,01V | 12 tavua |
| 3 | 0x04 | Etäisyys lähimpään pääsyasetukseen, yksikkö m | D1 D0 | DATA kuvaa lähimmän etäisyyden arvon, yksikkö 1m; Alku korkealta ja loppu matalalta | Kuusi tavua |
| 4 | 0x06 | Valon tehokyselyiden kumulatiivinen määrä | D3-D0 | DATA ilmaisee valojen lukumäärän, 4 tavua, korkein tavu ensin | Seitsemän tavua |
| 5 | 0x11 | APD-virta on päällä | D1=00(H)D0=00(H) | APD-virta on päällä | Kuusi tavua |
| 6 | 0x12 | APD-virta pois päältä | D1=00(H)D0=00(H) | APD-virta on pois päältä | Kuusi tavua |
| 7 | 0xED | Ylitöitä | 0x00 0x00 | Laser on lasertyöskentelysuojan alainen, eikä sitä voida mitata. | Kuusi tavua |
| 8 | 0xEE | Tehokkuusvirheet | 0x00 0x00 |
|
Kuusi tavua |
| 9 | 0XEF | Sarjaportin tiedonsiirron aikakatkaisu | 0x00 0x00 |
|
Kuusi tavua |
| 10 | 0x01 | Yhden etäisyyden mittaus (yksi tavoite, nolla toiselle ja kolmannelle kohteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ensimmäisen kohteen etäisyys (yksikkö 0,1 m) D5-D3 etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas maalietäisyys (yksikkö 0,1 m)3. Tavoitteet ovat lähellä farD9 (bit7-bit0) lipputavua: D9 on 7. paikka, joka ilmaisee pääaallon; 1: on pääaalto, 0: ei pääaaltoa.D9 on 6. paikka, joka ilmaisee kaiun; 1: kaikua on, 0: ei kaikuaD9 Viides asento ilmaisee laserin tilan; 1: normaali laser, 0: laservikaD9 on aikakatkaisulipun neljäs bitti, 1: normaali, 0: aikakatkaisuD9 on virheellinen 3. kohdassa (asetettu arvoon 1);D9 Toinen paikka ilmaisee APD-tilan; 1: normaali, 0: errorD9 on ensimmäinen paikka, joka osoittaa, onko olemassa edellinen kohde; 1: edellinen kohde on, 0: ei aikaisempaa kohdetta (kohde sokealla alueella).D9 0. bitti osoittaa, onko seuraava kohde; 1: on myöhempi kohde, 0: ei myöhempää kohdetta (pääkohteen jälkeinen kohde on seuraava kohde) | 14 tavua |
| 11 | 0x02 | Jatkuva etäisyys (yksi tavoite, nolla toiselle ja kolmannelle kohteelle, nolla kolmannelle kohteelle kohteen alussa ja lopussa) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 ensimmäisen kohteen etäisyys (yksikkö 0,1 m) D5-D3 etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas maalietäisyys (yksikkö 0,1 m)3. Tavoitteet ovat lähellä farD9 (bit7-bit0) lipputavua: D9 on 7. bitti, joka ilmaisee pääaallon; 1: on pääaalto, 0: ei pääaaltoa.D9 on 6. paikka, joka ilmaisee kaiun; 1: kaikua on, 0: ei kaikuaD9 Viides asento ilmaisee laserin tilan; 1: normaali laser, 0: laservikaD9 on aikakatkaisulipun neljäs bitti, 1: normaali, 0: aikakatkaisuD9 on virheellinen 3. kohdassa (asetettu arvoon 1);D9 Toinen paikka ilmaisee APD-tilan; 1: normaali, 0: errorD9 on ensimmäinen paikka, joka osoittaa, onko olemassa edellinen kohde; 1: edellinen kohde on, 0: ei aikaisempaa kohdetta (kohde sokealla alueella).D9 0. bitti osoittaa, onko seuraava kohde; 1: on myöhempi kohde, 0: ei myöhempää kohdetta (pääkohteen jälkeinen kohde on seuraava kohde) | 14 tavua |
| 12 | 0xEB | Numerokysely | D17…… D0 | D17 D16 D15 D14 D13 D12 Koko koneen mallikoodiD11D10 TuotenumeroD9 D6 ohjelmistoversioD5 D4 APD-numeroD3 D2 Lasernumero FPGA:n versio D1 | 22 tavua |
| Huomautus: ① Määrittämätön datatavu/bitti, oletusarvo on 0; | |||||
Hot Tags: 2mrad 2 km laseretäisyysmittari moduuli drone ststemille, valmistajat, toimittajat, tehdas, Kiina, valmistettu Kiinassa, räätälöity, korkea laatu
Aiheeseen liittyvä luokka
905 nm:n laseretäisyysmittarimoduuli
1535 nm:n laseretäisyysmittarimoduuli
1570nm laseretäisyysmittari
1,54UM Laser Rangefinder -moduuli
1064nm Laser Target Merkitsaattori
Drone -stSTEM -moduuli
Range Lidar-moduuli
Lähetä kysely
Ole hyvä ja lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.