Koti
>
Tuotteet > Laseretäisyysmittari moduuli > 1064nm Laser Target Merkitsaattori > 45MJ Laser Target Desicinetor (Ltd) Wiht LRF




 Wiht LRF")
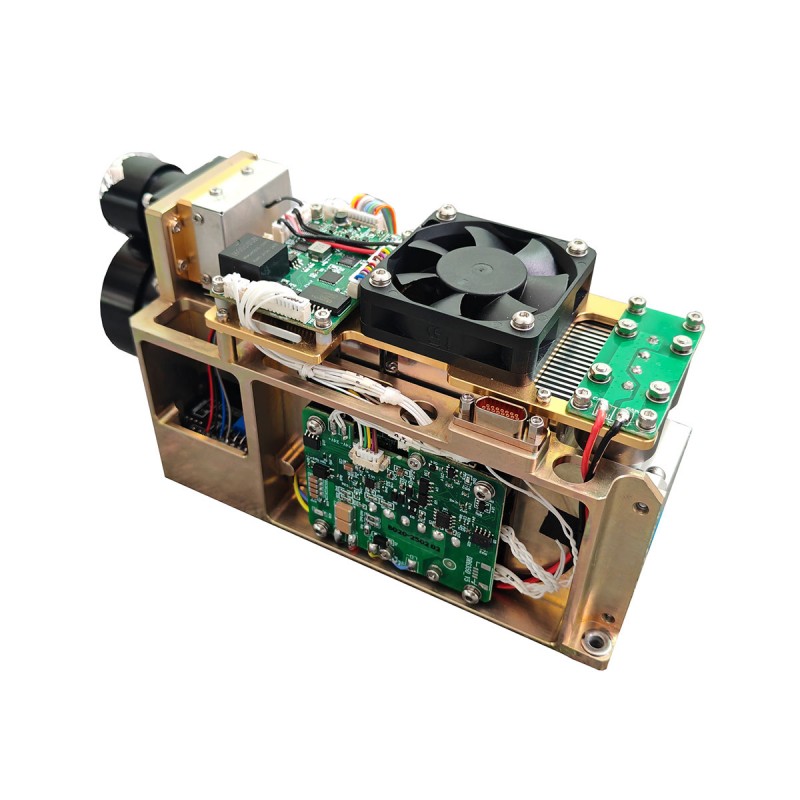
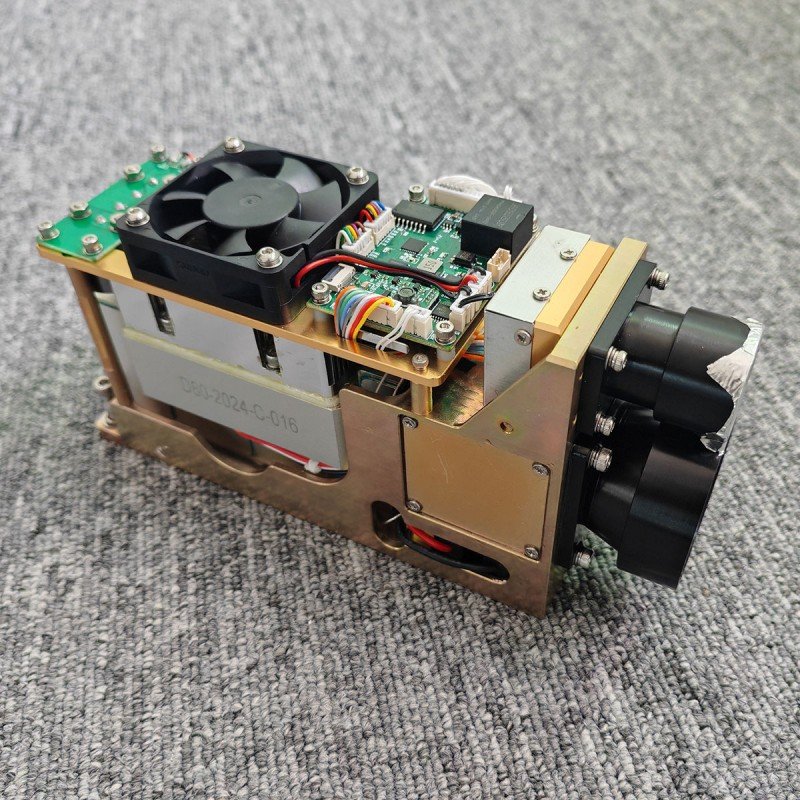
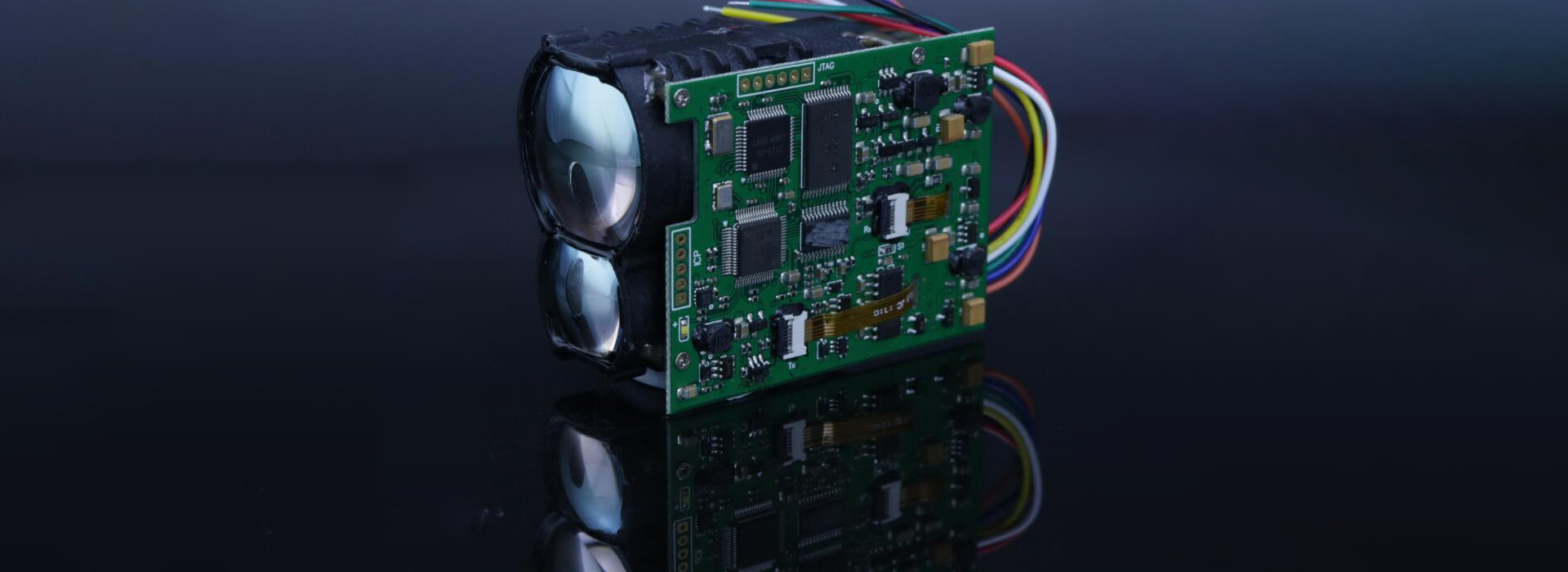
45MJ Laser Target Desicinetor (Ltd) Wiht LRF
Sta-B45M on sotilaallinen 45MJ-laser-kohde-nimeäjä, jolla on ratkaiseva rooli tarkkuusjärjestelmissä, jotka kykenevät tarjoamaan tarkkoja ohjeita älykkäille ammuksille. Edistyneen optisen järjestelmän avulla se merkitsee kohteen lasersäteellä varmistaen, että tarkkuusohjatut aseet voivat tuhota kohteen erittäin suurella tarkkuudella ja tehokkuudella.
Lähetä kysely
Tuotteen Kuvaus
Tuoteominaisuudet
Kevyt ja miniatyrisoitu
Ympäristön sopeutumiskyky: -40 ℃ ~ 60 ℃ Laaja lämpötilan sopeutumiskyky
Ympäristön sopeutumiskyky: -40 ℃ ~ 60 ℃ Laaja lämpötilan sopeutumiskyky
Ydinosoitinparametrit
Funktio
A) Sillä on säteilytysjakson asettaminen ja se voi suorittaa lasersäteilytyksen asetetun syklin mukaan.
b) varustettu laserilla ja toistuvilla etäisyyksillä.
c) varustettu monitasolla.
d) Varustettu lämpötilan lähtötoiminnolla kameran ydinkomponenteille.
e) varustettu mittauslaitteen ylikuumenemis suojaustoiminnolla.
f) Varustettu valaistuslaitteen tilatietojen tulostamisella.
A) Sillä on säteilytysjakson asettaminen ja se voi suorittaa lasersäteilytyksen asetetun syklin mukaan.
b) varustettu laserilla ja toistuvilla etäisyyksillä.
c) varustettu monitasolla.
d) Varustettu lämpötilan lähtötoiminnolla kameran ydinkomponenteille.
e) varustettu mittauslaitteen ylikuumenemis suojaustoiminnolla.
f) Varustettu valaistuslaitteen tilatietojen tulostamisella.
Tekniset parametrit
| Malli | STA-B6445M |
| Laser -aallonpituus | 1.06um (käyttämällä Nd: YAG Crystal, Design Selection -takuu) |
| Laser keskimääräinen energia | ≥ 45MJ (energianvaihtelut ≤ ± 8%); |
| Laser -divergenssikulma | 0,5 mrad |
| Laserpäästöjen optinen akselin vakaus | ≤ 0,05 mrad |
| Laserpäästöjen optinen akseli ja pohjatason asennus ei ole yhdensuuntainen | ≤ 3 '(suunnittelutakuu); |
| Laserpulssin leveys | 10ns ~ 22ns |
| Enimmäismäärä | Näkyvyys ≥ 12 km, NATO -kohteiden mittaamisen enimmäisalue ≥ 6 km; |
| Mini | 100m |
| Toistuva taajuus | 1Hz/5Hz/yksi |
| Etäisyystarkkuus | ≤ ± 2m (RMS) |
| etäisyystarkkuus | ≥ 98% |
| Etäisyysratkaisu | ≤ 50m |
| Jatkuva työaika | 5 min (5Hz: jatkuva työ 5 minuuttia, lepo ≤ 3min, voi jatkaa etäisyyttä). |
| Suurin säteilytysetäisyys | ≥ 5 km |
| Vähimmäisisäteilyetäisyys | ≤ 500m (järjestelmän arvioinnin kanssa) |
| Jatkuva säteilytysjakso | 8, jokainen sykli kestää 25S, 15S: n välein; 8 syklin jälkeen lepoväli ≤ 20 min; |
| Laserkoodikausi (asetettu viestintäprotokolla) | Asetusalue 40 ms ~ 100 ms |
| Laserkoodauksen ajoitustarkkuus | ≤ ± 2 μs |
| Laser-aloitusaika | ≤3min |
| Ylimääräinen synkronointitoiminto | Kyllä |
| Työlämpötila: | -40 ~+60 ℃ |
| Säilytyslämpötila | -50 ~+70 ℃ |
| Paino | ≤580 g |
| Moduuli sinulle | 138x75x50mm |
| monitasolla mittauskyky ja palauta kolme monitasoista arvoa etäisyyden selektiivisellä pass-toiminnolla. Freency-koodi ja muuttuvan väliaikaisen koodin asettaminen (asetettu viestintäprotokollan mukaan). | |
Käyttövalmistelu
Tarkista, onko virtalähteen jännite välillä 18 V - 32 V. Kun jännite on liian matala (alle 18 V), etäisyysmittari ei välttämättä kommunikoi oikein tai ilmaisee 'ei laserlähtöä', ja kun jännite on liian korkea (yli 32 V), koko valaisaattori voi vaurioitua pysyvästi. Varmista, että virtalähdejärjestelmän nimellistuottovirta on suurempi kuin 6a, jos se on pienempi kuin tämä arvo, laser ei saa olla toiminnan aikana. Varmista, että virtalähteen napaisuus on kytketty oikein, laitteille on vaurioiden riski, jos napaisuus käännetään. Katso liite A virtalähde -pistorasioiden määritelmät.
Varotoimenpiteet käytettäväksi
A) Tämän etäisyysmittarin lähettämä laser on 1,06 um: n ei-silmän turvallinen aallonpituuslaser, vältä silmiin suoraa laservaloa käytettäessä.
b) Kun säädät optisen akselin rinnakkaisuutta, muista estää vastaanottava linssi, muuten ilmaisin vaurioituu pysyvästi voimakkaan kaikun takia.
c) Tämä etäisyysmittarin moduuli ei ole ilmapiiri, muista käyttää ympäristöä suhteellisen kosteuden käyttäminen alle 80%ja varmista, että ympäristön puhtauden ja hygienian käyttö ei vahingoita laseria.
d) Elämänmiehen alue liittyy ilmakehän näkyvyyteen ja kohteen luonteeseen, sumun, sateen ja tuulen ja hiekan tapauksessa vähentävät etäisyyttä. Kohteilla, kuten vihreiden lehtien klustereilla, valkoisilla seinäillä ja paljaalla kalkkikivellä, on parempi heijastuskyky ja ne voivat lisätä etäisyyttä. Lisäksi kohteen kaltevuuden lisääntyminen lasersäteenä vähentää aluetta.
e) On ehdottomasti kielletty ampua lasersäde heijastavilla kohteilla, kuten lasi ja valkoiset seinät 100 metrin sisällä voimakkaiden kaikujen välttämiseksi, mikä voi aiheuttaa APD -ilmaisimen vaurioita.
f) On ehdottomasti kielletty irrottaa tai kytkeä kaapeli virran aikana.
g) Varmista, että tehon napaisuus on kytketty oikein, muuten se johtaa laitteen pysyviin vaurioihin.
b) Kun säädät optisen akselin rinnakkaisuutta, muista estää vastaanottava linssi, muuten ilmaisin vaurioituu pysyvästi voimakkaan kaikun takia.
c) Tämä etäisyysmittarin moduuli ei ole ilmapiiri, muista käyttää ympäristöä suhteellisen kosteuden käyttäminen alle 80%ja varmista, että ympäristön puhtauden ja hygienian käyttö ei vahingoita laseria.
d) Elämänmiehen alue liittyy ilmakehän näkyvyyteen ja kohteen luonteeseen, sumun, sateen ja tuulen ja hiekan tapauksessa vähentävät etäisyyttä. Kohteilla, kuten vihreiden lehtien klustereilla, valkoisilla seinäillä ja paljaalla kalkkikivellä, on parempi heijastuskyky ja ne voivat lisätä etäisyyttä. Lisäksi kohteen kaltevuuden lisääntyminen lasersäteenä vähentää aluetta.
e) On ehdottomasti kielletty ampua lasersäde heijastavilla kohteilla, kuten lasi ja valkoiset seinät 100 metrin sisällä voimakkaiden kaikujen välttämiseksi, mikä voi aiheuttaa APD -ilmaisimen vaurioita.
f) On ehdottomasti kielletty irrottaa tai kytkeä kaapeli virran aikana.
g) Varmista, että tehon napaisuus on kytketty oikein, muuten se johtaa laitteen pysyviin vaurioihin.
Määritelmä käyttöliittymän pistorasiat
Taulukko 1 Ulkoisten rajapintojen määritelmä
Taulukko 1 Ulkoisten rajapintojen määritelmä
| Tilausnumero | Rajapintatyyppi | Pigmentti | Määritelmä | Huomautukset |
| 1 | DB9 -rajapinnan määritelmä | Kämmen | RS422 T+ | RS422 -viestintärajapinta |
| 2 | Violetti | RS422 T- | ||
| 3 | Keltainen | RS422 R- | ||
| 4 | Vihreä | RS422 R+ | ||
| 5 | Valkoinen | Hölynpöly | ||
| 6 | Tuhka | Ulkoinen liipaisin- | RS422 -taso | |
| 7 | Sininen | Ulkoinen liipaisin + | ||
| 8 | Määritelmä Power Interface | Musta | VCC+ | DC 18V ~ 32V |
| 9 | Punainen | VCC- |
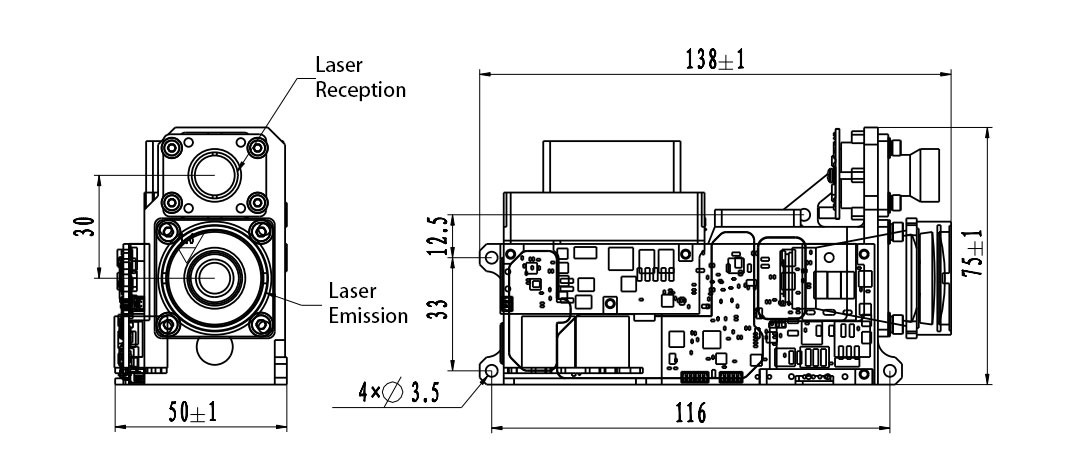
Kuva 2 Kaksiulotteinen koko kaavio tuotteesta
Rajapinnan viestintäprotokolla
1. Viestintämuoto:
A) Oletusasteen Baud -arvo on 115200 bps.
b) Tietomuoto: 8-bittinen data, yksi käynnistysbitti, yksi pysäytysbitti, ei pariteettitarkistus, data koostuu otsikon tavusta, komentoosasta, datan pituudesta, parametrien osasta ja tarkista tavu.
2. Viestintätila:
a) Master ja mittauslaite käyttävät master-orja-viestintätilaa, jossa päällikkö lähettää ohjauskomennot mittauslaitteeseen ja mittauslaite vastaanottaa ja suorittaa ohjeet. Aluetilassa mittauslaite lähettää mittauslaitteen tiedot ja tilan takaisin ylemmälle tietokoneelle kattavajakson mukaan, ja viestintämuoto ja komentojen sisältö esitetään seuraavassa taulukossa.
b) Kun päällikkö on lähettänyt ohjauskomennon, mittari reagoi jatkuvasti kolmella vastauskomennolla. Jos päällikkö ei vastaanota vastauskomentoa mittarilta määräajassa, se lähettää sen uudelleen.
Lähettävän viestin muoto on seuraava
A) Oletusasteen Baud -arvo on 115200 bps.
b) Tietomuoto: 8-bittinen data, yksi käynnistysbitti, yksi pysäytysbitti, ei pariteettitarkistus, data koostuu otsikon tavusta, komentoosasta, datan pituudesta, parametrien osasta ja tarkista tavu.
2. Viestintätila:
a) Master ja mittauslaite käyttävät master-orja-viestintätilaa, jossa päällikkö lähettää ohjauskomennot mittauslaitteeseen ja mittauslaite vastaanottaa ja suorittaa ohjeet. Aluetilassa mittauslaite lähettää mittauslaitteen tiedot ja tilan takaisin ylemmälle tietokoneelle kattavajakson mukaan, ja viestintämuoto ja komentojen sisältö esitetään seuraavassa taulukossa.
b) Kun päällikkö on lähettänyt ohjauskomennon, mittari reagoi jatkuvasti kolmella vastauskomennolla. Jos päällikkö ei vastaanota vastauskomentoa mittarilta määräajassa, se lähettää sen uudelleen.
Lähettävän viestin muoto on seuraava
| STX0 | Cmd | Lensi | Data1h | Data1L | Pakka |
Taulukko 2 Muoto Kuvaus lähetetystä viestistä
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu | 55 (h) |
|
| 2 | Cmd | CW | Katso taulukko 3 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | Data | parametri | Katso taulukko 3 |
|
| 5 | saapuminen |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Komento kuvataan seuraavasti:
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt mittarille
Taulukko 3 Kuvaus komentoista ja datasanoista, jotka päällikkö on lähettänyt mittarille
| tilausnumero | CW | funktio | tavu | huomautukset | pituus | Esimerkkikoodi |
| 1 | 0x00 | Pysäytä (lopeta valaistus) | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua | 55 00 02 00 00 57 |
| 2 | 0x01 | Yksiväli | D1 = 00 (H) d0 = 00 (H) | Mittauslaite vastaanottaa yhden etäisyysohjeen, suorittaa etäisyysoperaation ja lähettää etäisyysarvoa samanaikaisesti; | Kuusi tavua | 55 01 02 00 00 56 |
| 3 | 0x02 | Jatkuva | D1 = xx (h) d0 = yy (h) | Asetuksen mukaan etäisyysarvo ladataan jatkuvasti. Tiedot ilmaisevat etäisyyskauden ja yksikkö on MS | Kuusi tavua | 55 02 02 03 E8 BE (1Hz ALENNA) |
| 4 | 0x03 | itsensä tarkistaminen | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua | 55 03 02 00 00 54 |
| 5 | 0x04 | Sokean alueen asetukset | D1 = xx (h) d0 = yy (h) | Tiedot kuvaavat sokean vyöhykkeen arvoa, yksikköä 1M ja asettavat etäisyysnäytön sokean vyöhykkeen sisällä 0: een; | Kuusi tavua | 55 04 02 01 2C 7E (300 m on lähin etäisyys) |
| 6 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | D1 = 00 (H) D1 = 00 (H) | Poista varastointi; | Kuusi tavua | 55 06 02 00 00 51 |
| 7 | 0x31 | Aseta tarkka koodi | D4 D3 ~ D0 | D4: Tarkka koodinumero, sisäänrakennettu 8 ryhmää, numeroitu 1 ~ 8; d3 ~ d0 edustaa pulssijaksoa, yksikkö USRANGE: 45000 ~ 60000 | Yhdeksän tavua | 55 31 05 01 00 00 C3 50 F3 (tarkka koodinumero: 1Cycle: 0000C350 = 50000US) |
| 8 | 0x32 | Aseta muuttuvan väliaikakoodit | D33 (viite) D32 (koodausbittien lukumäärä) D31 ~ D30 (viimeisen bitin välillä 0) D29 ~ D28 (aikaväli bitin 14 ja bitin 15 välillä 15) d27 ~ d26 (aikaväli BIT13 BIT14) D25 ~ D24 (aikaväli bitin 12 ja bitin 13) D23 ~ D22: n välillä (aikaväli Bit11) välillä. BIT10 BIT11) D19 ~ D18 (Aikaväli BIT9 BIT10: n välillä) D17 ~ D16 (aikaväli BIT8 BIT9: n välillä) D15 ~ D14 (aikaväli BIT7 BIT8: n välillä) D13 ~ D12 (aikaväli BIT6: n ja BIT7: n välillä) D11 ~ D10 (aikaväli bit5 bit6) D9 ~ D8: n välillä (aikaväli bit4 bit5) d7 ~ välinen (aikaväli BIT5) välillä (aikaväli BIT5) d7 ~ D9: n välillä (aikaväli bit5) d7 ~ d9: n välinen aikaväli (aikaväli bit5) d9 ~ bit5) d9: n välillä. BIT4) D5 ~ D4 (aikaväli BIT2 BIT3: n välillä) D3 ~ D2 (aikaväli BIT1 BIT2: n välillä) D1 ~ D0 (aikaväli BIT0: n ja BIT1: n välillä) | D33: Muuttuvan väliaikaisen koodinumero, sisäänrakennetut 16 ryhmää, numeroalue on 1 ~ 16; D32: koodausbittien lukumäärä, välillä 3-16-aikaväliyksikkö USRANGE: 45000 ~ 60000 | 38 tavua |
|
| 9 | 0x33 | Pseudo-satunnaisten koodeiden asettaminen | D4 D3 ~ D0 | D4: Pseudo-satunnainen koodikoodikoodaus, jossa on 2 sisäänrakennettua ryhmää, numeroitu 1: stä 2: een; D3: Pseudosatunnaisen koodin pituus, välillä 2-16D2 D1: Pseudo-satunnaisen koodin alkuperäinen arvo, joka on otettu pseudo-satunnaisen koodin pituuden mukaan, asetettu 0 | Yhdeksän tavua | 55 33 05 01 10 AA AA 00 72 (pseudo-satunnainen koodinumero: 1PSEUDO Satunnainen koodin pituus: 16initiaalinen arvo: AAAA) |
| 10 | 0x41 | Aseta tarkkuuskoodien kysely | D1 D0 | D1: Tarkka koodinumero, numeroalue on 1 ~ 8d0: valmiustila, asetettu 0 | Kuusi tavua | 55 41 02 01 00 13Sarta tarkkuuskoodin 1 kysely |
| 11 | 0x42 | Aseta kysely muuttuvien väliaikakoodeille | D1 D0 | D1: Muuttuvan väliaikaisen koodinumero, numeroalue on 1 ~ 16D0: valmiustila, asetettu 0 | Kuusi tavua | 55 42 02 01 00 14SET KYSYMYS Muuttuvalle koodaukselle 1 |
| 12 | 0x43 | Aseta kysely pseudo-satunnaisiin koodeihin | D1 D0 | D1: pseudo-satunnainen koodinumero, numeroalue on 1 ~ 2d0: valmiustila, asetettu 0 | Kuusi tavua | 55 43 02 01 00 15SET Kysely pseudo-satunnaisella koodauksella 1 |
| 13 | 0x44 | Jatkuva säteilytyksen työajan asetus | D1 = 00 (H) d0 = yy (h) | YY jatkuva säteilytysaika viittaa mittarin jatkuvaan työaikaan jatkuvassa säteilytystilassa, yksiköt. Automaattinen pysäkki pysäytetään aikakatkaisun jälkeen | Kuusi tavua | 55 44 02 00 3C 2FCONTINEST -työaika 60S |
| 14 | 0x45 | Jatkuva säteilytystyökysely | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua | 55 45 02 00 00 12 |
| 15 | 0x30 | Tarkka koodin säteilytys | D3 ~ d0 | D3: Säteilytystila, 00 jatkuva säteilytys, 01 jaksollinen säteilytysD2: 01 Tarkka koodin säteilytys1: Tarkka koodinumeroD0: Valmiustila 00 | Kahdeksan tavua | 55 30 04 00 01 01 00 61CODE 1, tarkka koodin jatkuva valaistus |
| Muuttuvan väliaikakoodin säteilytys | D3 ~ d0 | D3: säteilytystila, 00 jatkuva säteilytys; 01 jaksollinen säteilytysD2: 02 Muuttujaväli koodin säteilytys1: muuttujaväli koodi numerod0: valmiustila 00 | Kahdeksan tavua | 55 30 04 00 02 01 00 62CODE 1, muuttuva aikaväli koodi jatkuva säteilytys | ||
| Ulkoinen synkroninen säteilytys | D3 ~ d0 | D3: 00 Ulkoinen synkronointi on vain jatkuva valaistusD2: 03 Ulkoinen synkroninen säteilytys1: 00d00: 00 | Kahdeksan tavua | 55 30 04 00 03 00 00 62 | ||
| Pseudo-satunnainen koodin säteilytys | D3 ~ d0 | D3: säteilytystila, 00 jatkuva säteilytys; 01 jaksollinen säteilytysD2: 04 Pseudo-satunnainen koodi Säteilyd1: Pseudo-satunnainen koodi NumberD0: Stapby 00 | Kahdeksan tavua | 55 30 04 00 04 01 00 64CODE 1, pseudo-satunnainen koodi jatkuva säteilytys | ||
| 16 | 0x24 | Jaksollinen säteilytysparametriasetus | D2 D1 D0 | D2: TyösyklesD1 | Seitsemän tavua | 55 24 03 08 14 0A 64 (8 sykliä, 20 sekuntia ja 10 s lepo sykliä kohti) |
| 17 | 0x25 | Jaksollinen säteilytysparametrikysely | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua | 55 25 02 00 00 72 |
| 18 | 0xeb | Laitteidenumerokysely | D1 = 00 (H) d0 = 00 (H) |
|
Kuusi tavua | 55 EB 02 00 00 eKr. |
| 19 | 0x51 | Virheenkorjaustila | D1 D0 | D1: 01 Syötä virheenkorjaustila, 00 Exit Debugging Moded0: valmiustila | Kuusi tavua | 55 41 02 01 00 17Enter Debug Mode55 41 02 00 00 16Exit Debug -tila |
|
|
|
|
|
|
|
|
a) Pääohjaus vastaanottaa muodon
Vastaanotetun viestin muoto on seuraava:
Vastaanotetun viestin muoto on seuraava:
| STX0 | Cmd | Lensi | DATAn | Päivämäärä0 | Pakka |
Taulukko 4 Vastaanotetun viestien muotokuva
| tilausnumero | nimi | selittää | koodi | huomautukset |
| 1 | STX0 | Viestin aloituslippu 1 | 55 (h) |
|
| 2 | Cmd_jg | Datakomennon sana | Katso taulukko 5 |
|
| 3 | Lensi | DL | Kaikkien tavujen lukumäärä paitsi aloitusmerkki, komento sana ja tarkistussumma |
|
| 4 | DN | parametri | Katso taulukko 5 |
|
| 5 | D0 |
|
||
| 6 | Pakka | XOR -varmennus | Lukuun ottamatta kelvollista tavua, kaikki muut tavut ovat xored |
|
Pääohjaus vastaanottava tila Kuvaus:
Taulukko 5 kuvaa mittarin lähettämää datasanaa päällikölle
Taulukko 5 kuvaa mittarin lähettämää datasanaa päällikölle
| tilausnumero | CW | Toimintopalaute (vastaa mittauslaitteen vastaanottamaa ohjauskomentoa) | tavu | huomautukset | kokonaispituus |
| 1 | 0x00 | Pysäytä (lopeta valaistus) | D1 = 00 (H) d0 = xx (h) | Xx: 00 Normaali stop01 Stop korkean lämpötilan02 pysähdyksessä, kun olet myöhässä | Kuusi tavua |
| 2 | 0x03 | itsensä tarkistaminen | D8 ~ d0c5 ~ c0b2 ~ b0 | D8-D7 (INT-tyyppi): -5V jännitteen arvon palaute, yksikkö 0.01V.D6-D5: SOLAN SPOT-asetusarvon palaute, yksikkö 1MD4-D3: APD korkean jännitteen palautteen, yksikkö V; D2: char-tyyppi, osoittaen pääohjausympäristön lämpötilan (ympäristö), yksikkö: aste Celsius; D1-D0: +5 V Voltages palaute, yksikkö 0.01VC5-C4: tosiasiallinen yksikkö AC3-C2: Aseta aseman virta-arvon palaute yksikössä AC1-C0: Lämpötilan säätölämpötilan palauteyksikkö 0.1 ℃ B2: Ajoneuvon lämpötilan säätötila (8-bittinen) BIT0: 0 Lämpötilan säätö Lämpötilaan 1 Ei saavutettu .1: 0 Lämpötilan säätö on normaali 1 Lämpötilan säätö on ylikuormitettu. Ero aseman virran ja asetetun arvon välillä on suurempi kuin 5AB1: Drive -viestintätilan (pääohjauspöydän ja aseman moduulin välisen viestinnän tilan mittaaminen) 0 on normaali ja 1 on vikakellari0: aseta onko virta onnistunut tekijä1: onko pulssin leveys asetettu onnistuneesti. Lämpötilanhallintaviestinnän tila (viestintätila pääohjauslevyn ja lämpötilan ohjausmoduulin välillä) 0 on normaali ja 1 on vikakirja0: onko lämpötilanhallinnan aloitus onnistunut. | 22 tavua |
| 3 | 0x04 | Sokea vyöhyke, yksikkö m | D1 D0 | Tiedot kuvaavat lähimmän etäisyysarvoa, yksikköä 1m; aloita korkea ja pää matala | Kuusi tavua (pudota virransäästö) |
| 4 | 0x06 | Kumulatiivinen määrä valonlähtökyselyjä | D3 ~ d0 | Tiedot ilmaisevat valojen lukumäärän, 4 tavua, korkealla tavulla ensin | Kahdeksan tavua |
| 5 | 0x31 | Aseta tarkka koodi | D4 D3 ~ D0 | D4: Tarkka koodinumero, alue 1 ~ 8d3 ~ d0 edustaa ajanjaksoa, yksikkö USRANGE: 45000 ~ 60000 | Yhdeksän tavua |
| 6 | 0x32 | Aseta muuttuvan väliaikakoodit | D1 D0 | D1 Muuttujaväli koodinumero Range 1 ~ 16D0 00 on asetettu onnistuneesti, ja 01 on asetettu epäonnistuneeksi | Kuusi tavua |
| 7 | 0x33 | Aseta pseudo-satunnainen koodi | D1 D0 | D1-pseudo-satunnainen koodinumero Range 1 ~ 2D0 00 on asetettu onnistuneesti, ja 01 on asetettu epäonnistuneeksi | Kuusi tavua |
| 8 | 0x41 | Tarkka koodisyklikysely | D4 D3 ~ D0 | D4: Tarkka koodinumero, alue 1 ~ 8D3 ~ D0 edustaa ajanjaksoa, yksikkö USRANGE: 45000US ~ 60000US | Yhdeksän tavua |
| 9 | 0x42 | Muuttuvan aikavälin koodikysely | D33 (viite) D32 (koodausbittien lukumäärä) D31 ~ D30 (viimeisen bitin välillä 0) D29 ~ D28 (aikaväli BIT14 BIT15: n välillä) D27 ~ D26 (Aikaväli BIT13 BIT14) D25 ~ D24 (aikaväli bitin 12 ja bittin 13) D23 ~ D22 (aikaväli bitti 12) D23 ~ D22 BIT 10: n ja bitti 11) välillä D19 ~ D18 (aikaväli BIT9: n ja BIT10: n välillä) D17 ~ D16 (aikaväli BIT8 BIT9: n välillä) D15 ~ D14 (aikaväli bitin 7 ja bitti 8) D13 ~ D12 (aikaväli BIT6 BIT7: n välillä) D11 ~ D10 (aikaväli BIT5 BIT6) D9 ~ D8: n välillä (BIT4: n välinen aika. BIT3 BIT4) D5 ~ D4 (aikaväli BIT2 BIT3: n välillä) D3 ~ D2 (aikaväli BIT1 BIT2: n välillä) D1 ~ D0 (aikaväli BIT0 BIT1: n välillä) |
|
38 tavua |
| 10 | 0x43 | Pseudo-satunnainen koodikysely | D4 D3 ~ D0 | D4: pseudo-satunnainen koodikoodi, alue 1 ~ 2d3: pseudo-satunnaisen koodin pituus, välillä 2-16D2 D1: Pseudosatunnaisen koodin alkuarvo, joka on otettu alemmasta bitistä pseudo-satunnaisen koodattujen koodattujen0: staal, asetettu 0 | Yhdeksän tavua |
| 11 | 0x44 | Jatkuva säteilytyksen työajan asetus | D1 = 00 (H) d0 = yy (h) | Yy jatkuva säteilytysaika, yksikkö S, aikakatkaisu automaattisesti | Kuusi tavua |
| 12 | 0x45 | Jatkuva altistumisen työaikakysely | D1 = 00 (H) d0 = yy (h) | Yy jatkuva säteilytysaika, yksikkö S, aikakatkaisu automaattisesti | Kuusi tavua |
| 13 | 0x24 | Jaksollinen säteilytysparametriasetus | D2 D1 D0 | D2: TyösyklesD1 | Seitsemän tavua |
| 14 | 0x25 | Jaksollinen säteilytysparametrikysely | D2 D1 D0 | D2: TyösyklesD1 | Seitsemän tavua |
| 15 | 0xeb | Laitteidenumerokysely | D15 ~ d0 | D15 ~ D12: Product ModelD11 D10: Product NumberD9 D8: Software VersionD7 D6: Säädä Q NumberD5 D4: Drive NumberD3 D2: Laser NumberD1 D0: FPGA ID | 20 tavua |
| 16 | 0x51 | Virheenkorjaustila | D1 D0 | D1: 01 Syötä virheenkorjaustila, 00 Exit Debugging Moded0: valmiustila | Kuusi tavua |
| 17 | 0x01 | Yksiväli | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B1 | D9 (BIT7-bit00) lipun tavu: D9 on seitsemäs sijainti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, 5. bitti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on virheellinen (asetettu arvoon 0) 4. sijainnissa; D9 on virheellinen kolmannessa asennossa (asetettu arvoon 0); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Tavoite on 0: Ei kohdetta (pääkohde ennen pääkohdetta on edellinen kohde, ja sokean alueen kohde) .d9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Tavoite on 0: Kohdetta ei ole (tavoite pääkohteen jälkeen on seuraava kohde) D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1M) 3. Tavoitteet ovat lähellä Farb4: tä ja B3 osoittavat korkeapainearvotB2: n osoittavat, että käyttövirta -arvob1 B0 osoittaa laserin lämpötilan | 19 tavua |
| 18 | 0x02 | Jatkuva | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (BIT7-bit00) lipun tavu: D9 on seitsemäs sijainti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, 5. bitti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on virheellinen 4. sijainnissa (asetettu arvoon 0); D9 on virheellinen kolmannessa asennossa (asetettu arvoon 0); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Tavoite on 0: Kohdetta ei ole (kohde ennen pääkohdetta on edellinen kohde ja kohde sokealla alueella) .d9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Tavoite on 0: Kohdetta ei ole (pääkohde pääkohde on seuraava kohde) D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 Kolmas tavoiteetäisyys (yksikkö 0,1M) 3. Tavoitteet ovat lähellä FARB4: tä ja B3 osoittavat, että APD -korkeapaine -arvob2 osoittaa, että käyttövirta -arvob1 B0 edustaa laserin lämpötilaa | 19 tavua |
| 19 | 0x30 | loistava | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (BIT7-bit00) lipun tavu: D9 on seitsemäs bitti, joka osoittaa pääaallon; 1: Pääaalto on, 0: Ei pääaaltoa.d9 on kuudes sijainti, joka osoittaa kaikua; 1: Echo, 0: Ei echod9, 5. bitti osoittaa lasertilan; 1: Normaali laser, 0: Laser -vika9 on virheellinen asennossa 4 (asetettu arvoon 0) D9 on virheellinen kolmannessa asennossa (asetettu arvoon 0); D9 Toinen sijainti osoittaa APD -tilan; 1: Normaali, 0: Virhe9 on ensimmäinen sijainti, joka osoittaa, onko aikaisempaa kohdetta; 1: Tavoite on 0: Ei kohdetta (pääkohde ennen pääkohdetta on edellinen kohde, ja sokean alueen kohde) .d9 0. bitti osoittaa, onko seuraavaa kohdetta; 1: Tavoite on 0: Kohdetta ei ole (pääkohde pääkohde on seuraava kohde) D8-D6 Ensimmäinen tavoiteetäisyys (yksikkö 0,1 m) D5-D3-etäisyys toiseen kohteeseen (yksikkö: 0,1 m) D2-D0 kolmas tavoiteetäisyys (yksikkö 0,1 m) 3. Tavoitteet ovat lähellä FARB4: tä ja B3 osoittavat, että APD -korkeapaine -arvob2 osoittaa, että käyttövirta -arvob1 B0 edustaa laserin lämpötilaa | 19 tavua |
| 20 | 0xec | Ohjevirhe | D1 = 00 D0 = 00 | Kameran palautekomento on väärä | Kuusi tavua |
| 21 | 0xee | Tehokkuusvirheet | D1 = 00 D0 = 00 | Kameran palaute on virheellinen | Kuusi tavua |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| HUOMAUTUS: ① määrittelemätön datatavu/bitti, oletus on 0; | |||||
Hot Tags: 45MJ Laser Target Desicinetor (Ltd) Wiht LRF, valmistajat, toimittajat, tehdas, Kiina, valmistettu Kiinassa, räätälöity, korkealaatuinen
Aiheeseen liittyvä luokka
905 nm:n laseretäisyysmittarimoduuli
1535 nm:n laseretäisyysmittarimoduuli
1570nm laseretäisyysmittari
1,54UM Laser Rangefinder -moduuli
1064nm Laser Target Merkitsaattori
Drone -stSTEM -moduuli
Range Lidar-moduuli
Lähetä kysely
Ole hyvä ja lähetä kyselysi alla olevalla lomakkeella. Vastaamme sinulle 24 tunnin kuluessa.




 Wiht LRF")